原论文:Progressive Semantic Segmentation
问题描述
当对大型图片进行语义分割时,可能会导致显存炸掉。收到内存限制,可以选择下采样,或将图像划分为局部块。但前者会丢失细节,后者会却反全局视图。
后处理改善分割细节
经典方法
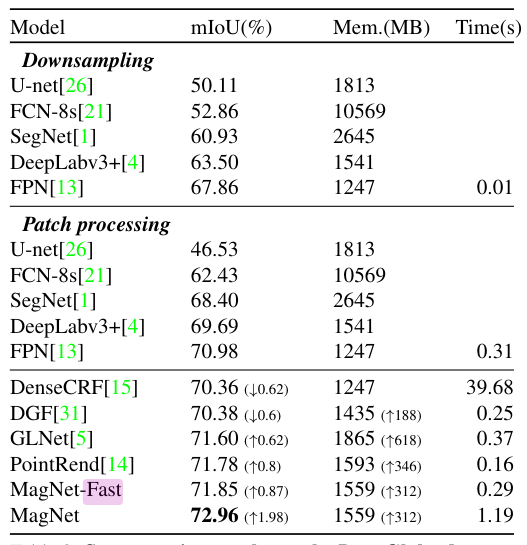
条件随机场(CRF),引导滤波器(GF),两个速度慢,改进是渐进的。
深度学习的引导过滤器(DGF)可以提高推理速度
迭代实例分割(ISS)
通过多次将输入图像和分割图像通过细化模块来多次细化输出。
这种细化过程是自反的,因此每一个细化层的输入图像都是相同的
CascadedPSP
才用与ISS相同的细化模式,但是对于每一个细化层的输入与ISS不同,才用的是不同分辨率的原图和分割图像进行细化。
MagNet
核心模块为:segmentation and refinement
在refinement模块中,每一层的输入两张分割图
- 前几层的累积结果
- 当前层的当前规模和比例的分割模块计算结果
在sementation中,可以应用与多个分割主干
refinement与分割主干无关,可以在任意一个主干训练,在另一个主干使用。
多级过程通道处理
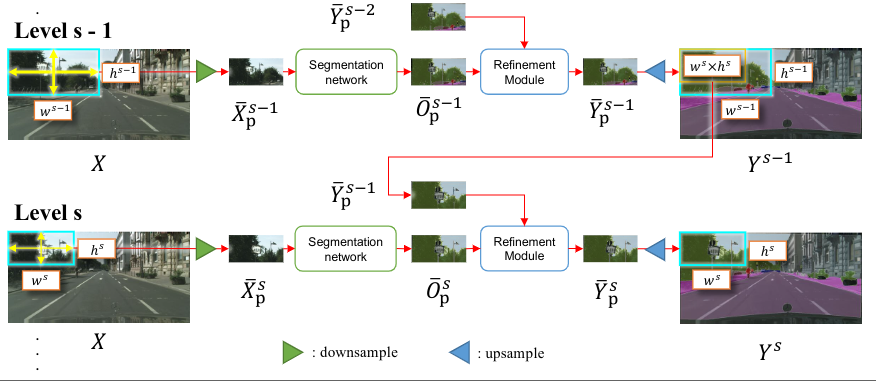
用s表示每一个处理阶段,s = 1对应最初的粗分割处理块,s=m对应最后的细分结果
令h,w为最大的可被分割模块处理的大小
使用表示level s对应块输入图像的高,宽
通常的比例是递减的
特定比例级别s的处理块
先将输入图片X划分为若干个 X 的小块,并对这些小块进行语义分割。
对于每一个小块的位置用集合表示,
x,y:当前块左上角在图像上的位置
:当前块的宽高
随着比例s的增加,巨型窗口的宽度和高度减小的基数增加
对于特等的窗口p,将使用表示在窗口P处提取的图像块
对于每个窗口p,执行以下操作:
- 对于当前层的窗口进行图像分割,将上一个层对应窗口,提取出其长宽为的部分
- 对和进行下采样,使得图像达到h,w,他们大小可以输入GPU中,并通过分割模块和细分模块进行处理。
- 的分割结果用表示
Refinement模块(细分模块)
用于优化各个窗口的细节部分
主要有两个输入
1. 先前一个模块的细分结果+下采样最终获得的特征图
2. 原图经过Segmentation的结果
refinement结构图
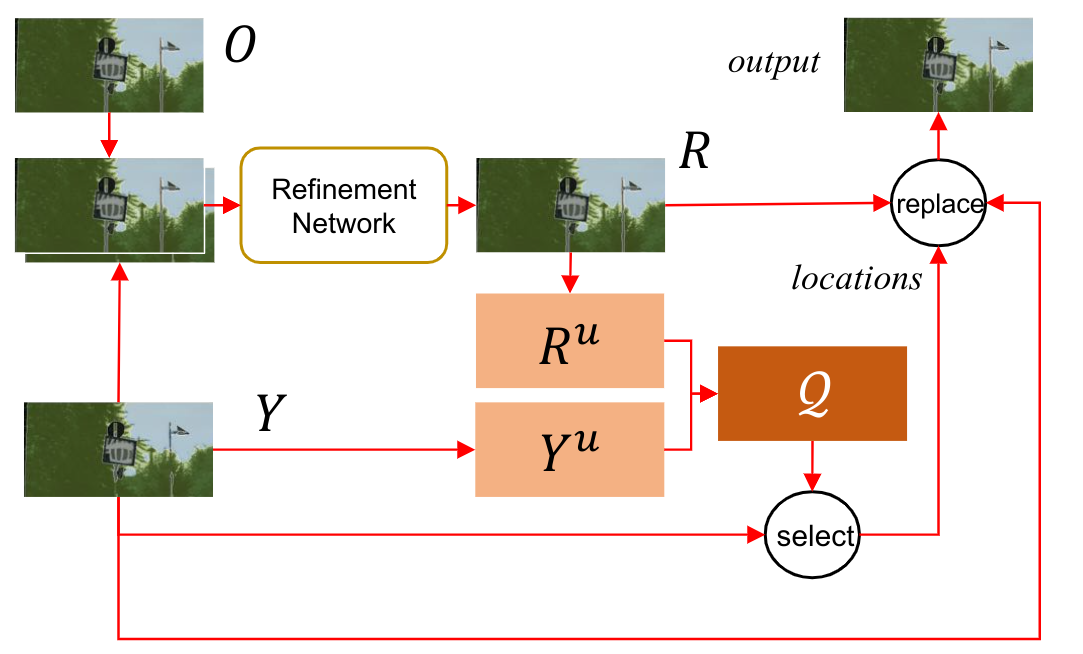
O:是分割结果
Y:是上一层细分结果
R:O和Y经过细分模块出来的图像
:R的不确定性图,计算方式为对每一个像素,其对应点的值为,置信度最高-置信度第二高的值
:Y的不确定性图,同R的计算方式
这个做法与PointRend类似,但是只用了一个不确定性图,而这里用了两个。
最终获得的像素得分图(每个像素预测为1类和预测为2类的差值)计算方式为:
其中符号表示对每个像素进行相乘
表示中值滤波平滑处理(这个我也不是很懂)
通过最终计算处的得分图,找出图像中需要优化的k个点。
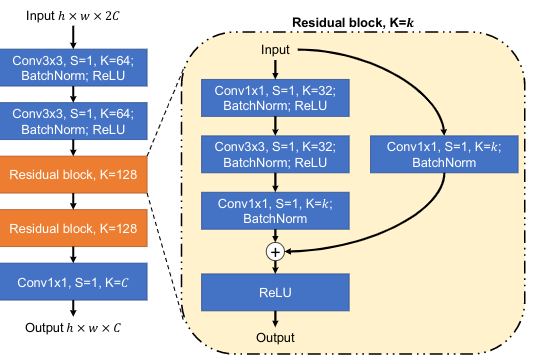
优化网络的实际结构:
对比与其他算法的优点
- SegFix:无法恢复被覆盖较大的小物体,如标志杆。
- PointRend:缺乏全局上下文信息。
MagNet-Fast
是MagNet的快速版,优化点在于减少了分块次数,同时在细分模块中只使用进行优化点选取,这样大大地提高了计算速度。
在做过这样的简化后对之前的算法在miou指标上,仍有提升
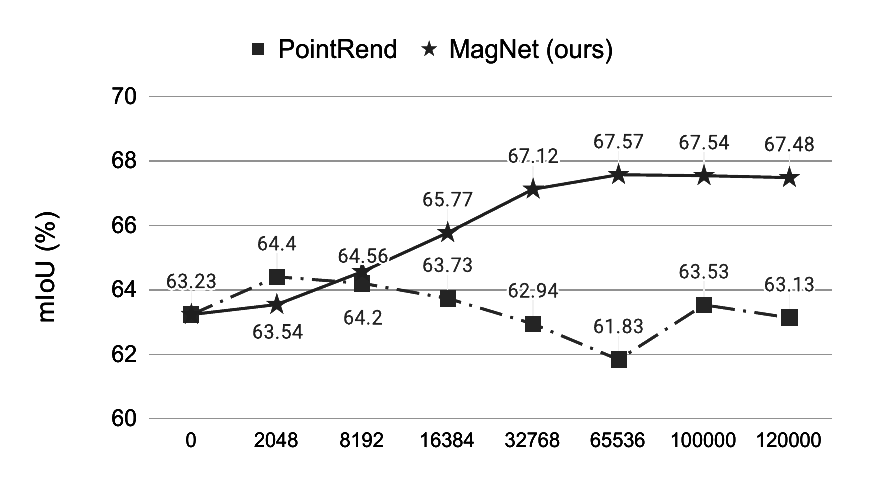
消融实验结果
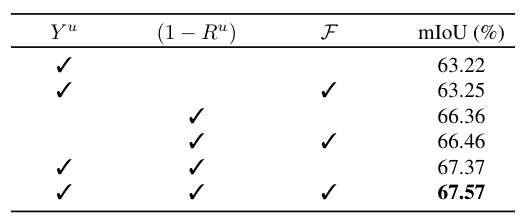
经过作者团队的测试,选取的优化点k数量为时能获得最佳效果
选择优化点数量增加效率对比度